Java教程
【ROS教程】安装ROS全流程及可能遇到的问题

本文主要是介绍【ROS教程】安装ROS全流程及可能遇到的问题,对大家解决编程问题具有一定的参考价值,需要的程序猿们随着小编来一起学习吧!
@TOC
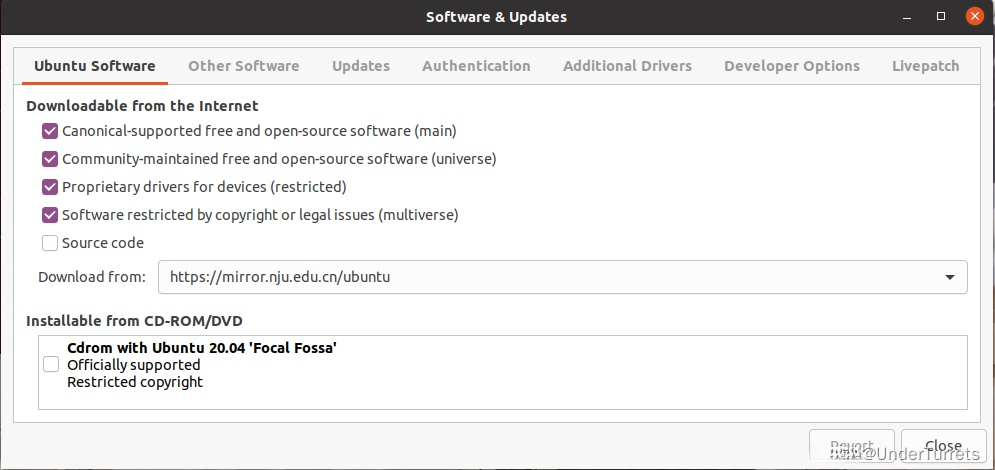
1.配置Softerware & Updates
- 如图所示配置即可
2.添加软件源
- 如果不添加软件源,是无法定位软件包的
清华源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
3.设置key
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
- 如果不设置key,在sudo apt update的时候会有如下问题

4.更新并安装
4.1 更新
sudo apt update
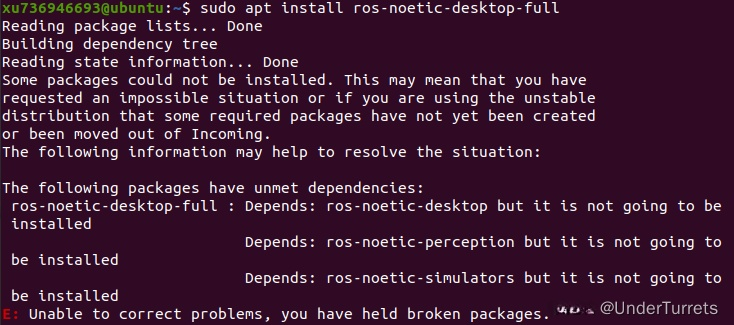
4.2 安装(ros-noetic-desktop-full)
- 如果使用apt安装,几乎百分百会出现如下问题
- 因此我们使用aptitude安装
4.2.1 安装aptitude
sudo apt install aptitude
4.2.2 安装ROS软件包
sudo aptitude install ros-noetic-desktop-full
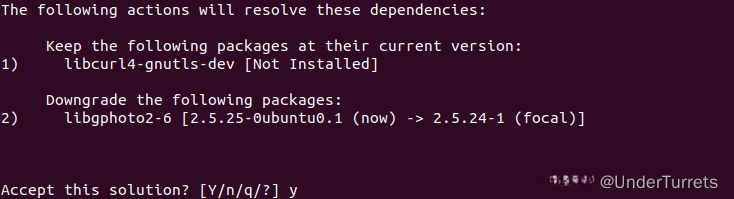
- 接下来会列出一栏未安装的,如下图
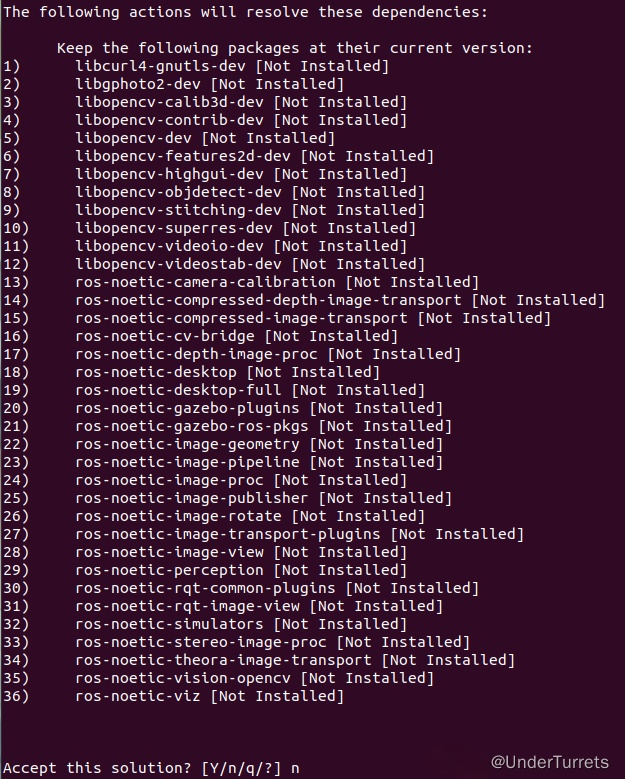
- 切记,此时一定要选no
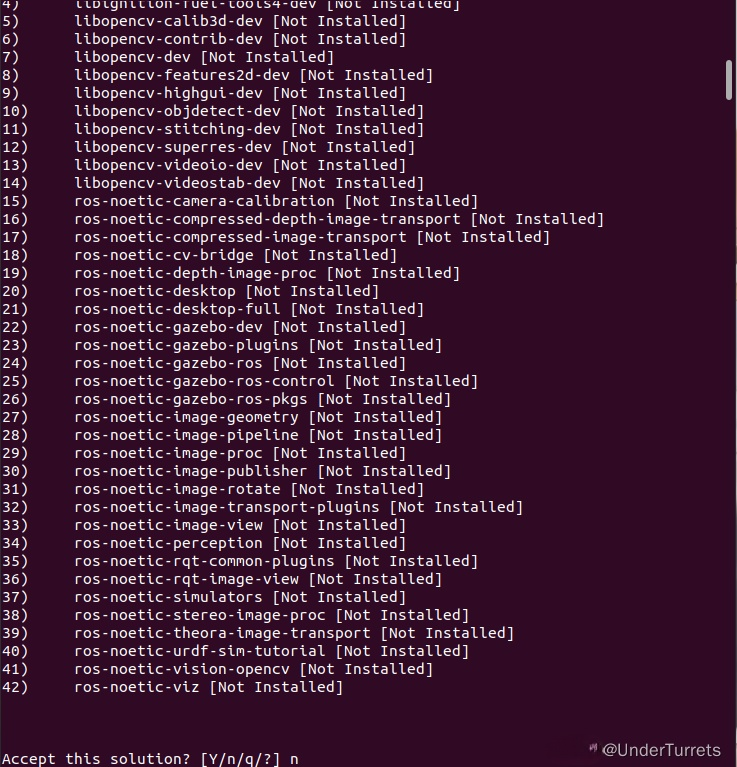
- 然后,aptitude会给出第二个解决方案,仍然有很多未安装的,继续选no
- 第三次,aptitude给出了满意的方案,只有一个未安装的,这时可以选yes了
5.添加环境变量
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
6.安装构建依赖
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
7.初始化和更新
7.1 初始化
sudo rosdep init
- 由于境外资源被屏蔽,这样初始化几乎百分百会失败

7.1.1 目前可行的解决办法:重新定位资源
- 修改/usr/lib/python3/dist-packages/rosdistro/__init__.py的第68行
- 修改/usr/lib/python3/dist-packages/rosdep2/sources_list.py的第64行
- 修改/usr/lib/python3/dist-packages/rosdep2/rep3的第36行
- 修改方式:把
raw.githubusercontent.com/ros/rosdistro/master替换成gitee.com/zhao-xuzuo/rosdistro/raw/master,如下图


7.1.2 结果
sudo rosdep init
- 如果出现以下结果,则成功

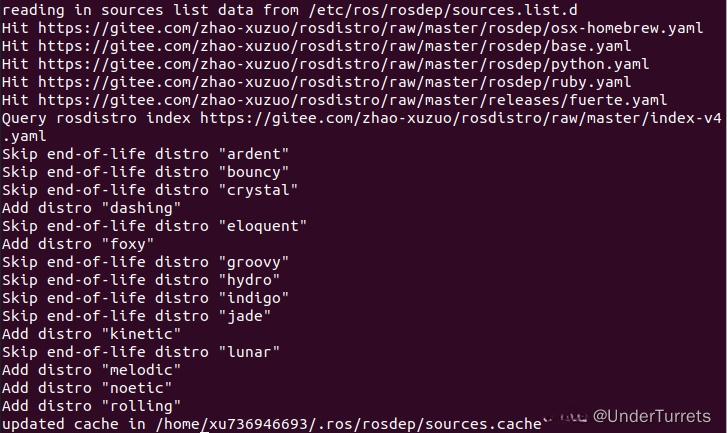
7.2 更新
rosdep update
- 结果
本文由博客一文多发平台 OpenWrite 发布!
这篇关于【ROS教程】安装ROS全流程及可能遇到的问题的文章就介绍到这儿,希望我们推荐的文章对大家有所帮助,也希望大家多多支持为之网!
您可能喜欢
-
百万架构师第十三课:源码分析:Spring 源码分析:Spring核心IOC容器及依赖注入原理|JavaGuide01-10
-
便捷好用的电商API工具合集01-10
-
必试!帮 J 人团队解决物流错发漏发的软件神器!01-09
-
不容小觑!助力 J 人物流客服安抚情绪的软件!01-09
-
为什么医疗团队协作离不开智能文档工具?01-09
-
惊叹:J 人团队用啥软件让物流服务快又准?01-09
-
如何利用数据分析工具优化项目资源分配?4种工具推荐01-09
-
多学科协作难?这款文档工具可以帮你省心省力01-09
-
团队中的技术项目经理TPM:工作内容与资源优化策略01-09
-
JIT生产管理法:优化流程,提升竞争力的秘诀01-09
-
2024全球互联网流量分析报告01-09
-
如何提升学校行政管理中的进度追踪效率?4个实用策略和3款工具推荐01-09
-
提升直播效果的复盘技巧,你必须知道的五个步骤01-09
-
电商蛇年营销实战:看板工具提升效率效果01-09
-
产品开发中如何解决跨团队协作问题?协同工具来解决这些问题01-09
栏目导航
