人工智能学习
将强化学习引入NLP:原理、技术和代码实现

本文深入探讨了强化学习在自然语言处理(NLP)中的应用,涵盖了强化学习的基础概念、与NLP的结合方式、技术细节以及实际的应用案例。通过详细的解释和Python、PyTorch的实现代码,读者将了解如何利用强化学习优化NLP任务,如对话系统和机器翻译。

1. 强化学习简介
强化学习是机器学习的一个分支,涉及智能体(agent)如何在一个环境中采取行动,从而最大化某种长期的累积奖励。
1.1 什么是强化学习?
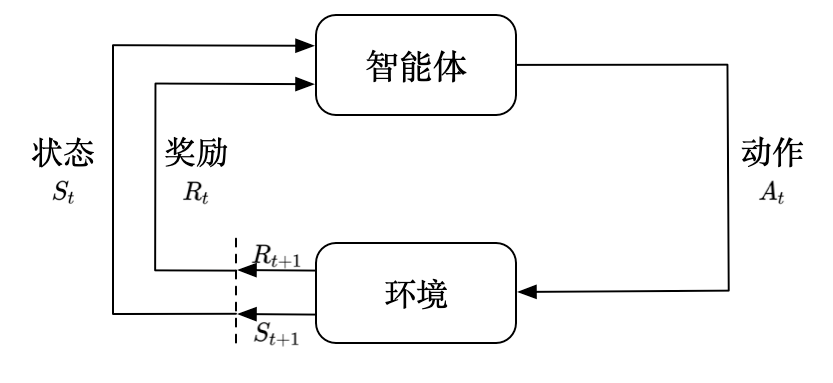
强化学习的核心思想是:一个智能体在一个环境中采取行动,每个行动会导致环境的某种反馈(通常是奖励或惩罚)。智能体的目标是学习一个策略,该策略指定在每个状态下应该采取什么行动,从而最大化未来的累积奖励。
例子:想象一个训练机器人在迷宫中寻找出口的场景。每当机器人走到一个新的位置,它都会得到一个小的奖励或惩罚,取决于这个位置距离出口的远近。机器人的目标是学习一个策略,使其能够最快地找到迷宫的出口,并累积最多的奖励。
1.2 强化学习的核心组件
1.2.1 智能体 (Agent)
智能体是在环境中采取行动的实体,其目标是最大化长期奖励。
例子:在玩电子游戏(例如Flappy Bird)的强化学习模型中,智能体是一个虚拟的“玩家”,它决定什么时候跳跃,以避免障碍物。
1.2.2 状态 (State)
状态描述了环境在某一时刻的情况。它是智能体采取决策的基础。
例子:在国际象棋的游戏中,状态可以是棋盘上每个棋子的位置。
1.2.3 动作 (Action)
动作是智能体在给定状态下可以采取的行为。
例子:在上述的迷宫机器人例子中,动作可以是向上、向下、向左或向右移动。
1.2.4 奖励 (Reward)
奖励是对智能体采取某个动作后,环境给予其的即时反馈。它旨在指导智能体做出有利于其长期目标的决策。
例子:在自动驾驶车的强化学习模型中,如果车辆遵循交通规则并平稳驾驶,则可能获得正奖励;而如果车辆撞到障碍物或违反交通规则,则可能获得负奖励。
2. 强化学习与NLP的结合
当我们谈论自然语言处理(NLP)时,我们通常指的是与人类语言相关的任务,如机器翻译、情感分析、问答系统等。近年来,强化学习已成为NLP领域的一个热门研究方向,因为它为处理一些传统困难的NLP问题提供了新的视角和方法。
2.1 为什么在NLP中使用强化学习?
许多NLP任务的特点是其输出是结构化的、顺序的,或者任务的评估指标不容易进行微分。传统的监督学习方法可能在这些任务上遇到挑战,而强化学习提供了一个自然的框架,使得模型可以在任务中进行探索,并从延迟的反馈中学习。
例子:考虑对话系统,其中机器需要生成一系列的回复来维持与用户的对话。这不仅需要考虑每一句的合理性,还要考虑整体对话的连贯性。强化学习允许模型在与真实用户互动时探索不同的答案,并从中学习最佳策略。
2.2 强化学习在NLP中的应用场景
2.2.1 对话系统
对话系统,特别是任务驱动的对话系统,旨在帮助用户完成特定的任务,如预订机票或查询信息。在这里,强化学习可以帮助模型学习如何根据上下文生成有意义的回复,并在多轮对话中实现任务的目标。
例子:一个用户向餐厅预订系统询问:“你们有素食菜单吗?”强化学习模型可以学习生成有助于预订过程的回复,例如:“是的,我们有素食菜单。您想预订几位?”而不是简单地回答“是的”。
2.2.2 机器翻译
尽管机器翻译经常使用监督学习,但强化学习可以优化那些与直接翻译质量评估相关的指标,如BLEU分数,从而提高译文的质量。
例子:考虑从英语翻译到法语的句子。“The cat sat on the mat”可能有多种合理的法语译文。强化学习可以帮助模型探索这些可能的译文,并根据外部评估器的反馈来优化输出。
2.2.3 文本生成
文本生成任务如摘要、故事生成等,要求模型生成连贯且有意义的文本段落。强化学习为这类任务提供了一个自然的方式来优化生成内容的质量。
例子:在自动新闻摘要任务中,模型需要从长篇新闻中提取关键信息并生成一个简短的摘要。强化学习可以帮助模型学习如何权衡信息的重要性,并生成读者喜欢的摘要。
3. 技术解析
深入探讨强化学习与NLP结合时所使用的关键技术和方法,理解这些技术是如何工作的、它们如何为NLP任务提供支持。
3.1 策略梯度方法
策略梯度是一种优化参数化策略的方法,它直接估计策略的梯度,并调整参数以优化期望的奖励。
概念
策略通常表示为参数化的概率分布。策略梯度方法的目标是找到参数值,使得期望奖励最大化。为此,它估计策略关于其参数的梯度,并使用此梯度来更新参数。
例子:在机器翻译任务中,可以使用策略梯度方法优化译文的生成策略,使得翻译的质量或BLEU分数最大化。
3.2 序列决策过程
在许多NLP任务中,决策是序列性的,这意味着在一个时间点的决策会影响后续的决策和奖励。
概念
序列决策过程通常可以用马尔可夫决策过程(MDP)来描述,其中每一个状态只依赖于前一个状态和采取的动作。在这种情况下,策略定义了在给定状态下选择动作的概率。
例子:在对话系统中,系统的回复需要考虑到之前的对话内容。每次回复都基于当前的对话状态,并影响后续的对话流程。
3.3 深度强化学习
深度强化学习结合了深度学习和强化学习,使用神经网络来估计价值函数或策略。
概念
在深度强化学习中,智能体使用深度神经网络来处理输入的状态,并输出一个动作或动作的概率分布。通过训练,神经网络可以从大量的交互中学习到有效的策略。
例子:在文本生成任务中,可以使用深度强化学习来优化生成的文本内容。例如,使用神经网络模型根据当前的文章内容预测下一个词,而强化学习部分可以根据生成内容的质量给予奖励或惩罚,从而优化模型的输出。
4. 实战案例 - 对话系统
对话系统的核心目标是与用户进行有效的交互,为用户提供所需的信息或协助。在此,我们将通过一个简单的对话系统示例,展示如何利用强化学习优化对话策略。
4.1 定义状态、动作和奖励
4.1.1 状态 (State)
对话系统的状态通常包括当前对话的历史记录,例如前几轮的对话内容。
例子:如果用户问:“你们有素食菜单吗?”,状态可以是["你们有素食菜单吗?"]。
4.1.2 动作 (Action)
动作是系统可以采取的回复。
例子:系统的可能回复包括:“是的,我们有。”、“不好意思,我们没有。”或“你想要预定吗?”等。
4.1.3 奖励 (Reward)
奖励是基于系统回复的效果给出的数值。例如,如果回复满足用户需求,可以给予正奖励;否则,给予负奖励。
例子:如果用户问:“你们有素食菜单吗?”,系统回复:“是的,我们有。”,则可以给予+1的奖励。
4.2 强化学习模型
我们可以使用PyTorch来实现一个简单的深度强化学习模型。
import torch
import torch.nn as nn
import torch.optim as optim
# 定义一个简单的神经网络策略
class DialoguePolicy(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(DialoguePolicy, self).__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = torch.relu(self.fc1(x))
return torch.softmax(self.fc2(x), dim=1)
# 初始化模型和优化器
input_size = 10 # 假设状态向量的大小为10
hidden_size = 32
output_size = 3 # 假设有三个可能的回复
policy = DialoguePolicy(input_size, hidden_size, output_size)
optimizer = optim.Adam(policy.parameters(), lr=0.01)
# 模型的输入、输出
state = torch.rand((1, input_size)) # 假设的状态向量
action_probabilities = policy(state)
action = torch.multinomial(action_probabilities, 1) # 根据策略选择一个动作
print("Action Probabilities:", action_probabilities)
print("Chosen Action:", action.item())
4.3 交互和训练
模型与环境(用户模拟器)交互,获取奖励,然后根据奖励优化策略。在实际应用中,可以使用真实用户的反馈来优化策略。
5. 实战案例 - 机器翻译
机器翻译的目标是将一种语言的文本准确地转换为另一种语言。强化学习可以优化生成的翻译,使其更为流畅和准确。接下来,我们将探讨如何使用强化学习来优化机器翻译系统。
5.1 定义状态、动作和奖励
5.1.1 状态 (State)
机器翻译的状态可以是原文的部分或全部内容,以及已生成的翻译。
例子:原文:“How are you?”,已生成的翻译:“你好”,状态可以是["How are you?", "你好"]。
5.1.2 动作 (Action)
动作是模型决定的下一个词或短语。
例子:基于上面的状态,可能的动作包括:“吗?”、“是”、“的”等。
5.1.3 奖励 (Reward)
奖励可以基于生成的翻译的质量,例如BLEU分数,或其他评价指标。
例子:如果生成的完整翻译是:“你好吗?”,与参考翻译相比,可以计算出一个BLEU分数作为奖励。
5.2 强化学习模型
使用PyTorch实现简单的深度强化学习策略模型。
import torch
import torch.nn as nn
import torch.optim as optim
# 定义一个简单的神经网络策略
class TranslationPolicy(nn.Module):
def __init__(self, input_size, hidden_size, output_size):
super(TranslationPolicy, self).__init__()
self.fc1 = nn.Linear(input_size, hidden_size)
self.fc2 = nn.Linear(hidden_size, output_size)
def forward(self, x):
x = torch.relu(self.fc1(x))
return torch.softmax(self.fc2(x), dim=1)
# 初始化模型和优化器
input_size = 100 # 假设状态向量的大小为100 (原文和已生成翻译的嵌入表示)
hidden_size = 64
output_size = 5000 # 假设目标语言的词汇表大小为5000
policy = TranslationPolicy(input_size, hidden_size, output_size)
optimizer = optim.Adam(policy.parameters(), lr=0.01)
# 模型的输入、输出
state = torch.rand((1, input_size)) # 假设的状态向量
action_probabilities = policy(state)
action = torch.multinomial(action_probabilities, 1) # 根据策略选择一个动作
print("Action Probabilities:", action_probabilities[0, :10]) # 打印前10个动作的概率
print("Chosen Action:", action.item())
5.3 交互和训练
模型生成翻译,并与环境(这里可以是一个评价系统)交互以获得奖励。之后,使用这些奖励来优化翻译策略。
-
从零开始学习贪心算法12-26
-
线性模型入门教程:基础概念与实践指南12-26
-
探索随机贪心算法:从入门到初级应用12-25
-
树形模型进阶:从入门到初级应用教程12-25
-
搜索算法进阶:新手入门教程12-25
-
算法高级进阶:新手与初级用户指南12-25
-
随机贪心算法进阶:初学者的详细指南12-25
-
贪心算法进阶:从入门到实践12-25
-
线性模型进阶:初学者的全面指南12-25
-
朴素贪心算法教程:初学者指南12-25
-
树形模型教程:从零开始的图形建模入门指南12-25
-
搜索算法教程:初学者必备指南12-25
-
算法高级教程:入门与初级用户指南12-25
-
随机贪心算法教程:初学者指南12-25
-
贪心算法教程:入门与实践指南12-25
